

Robot Ludens (2017)
Playing Alive & Playing Dead
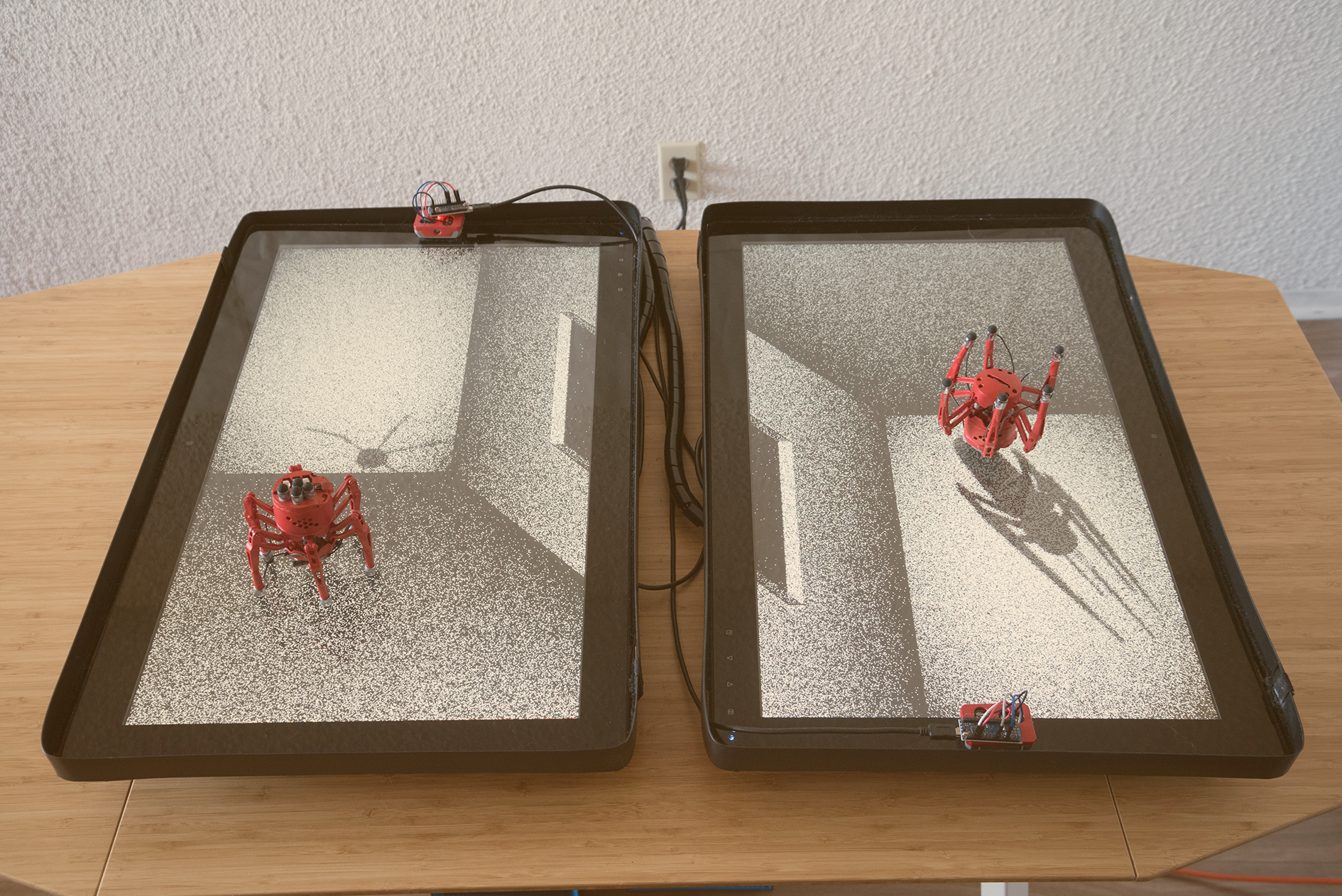
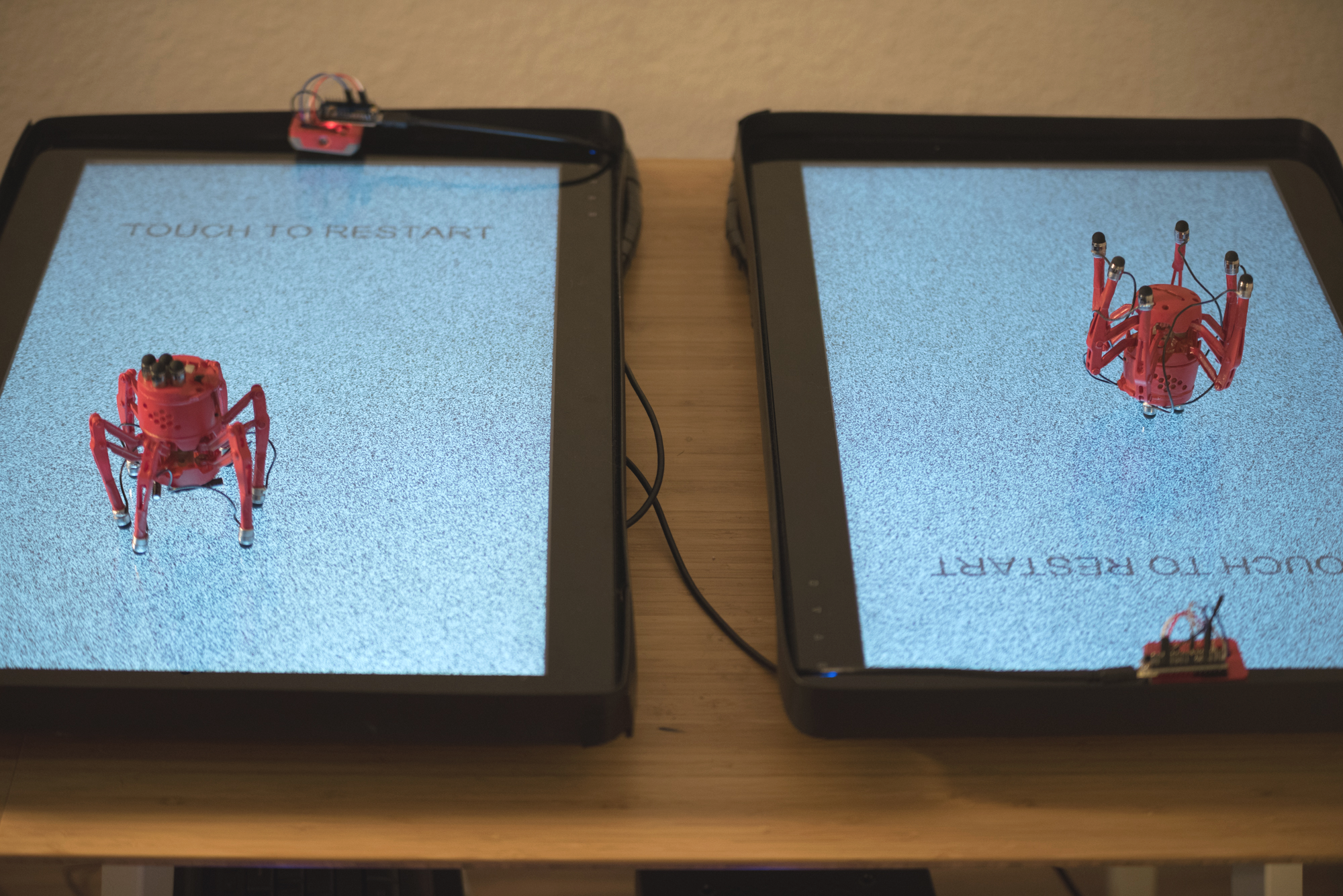
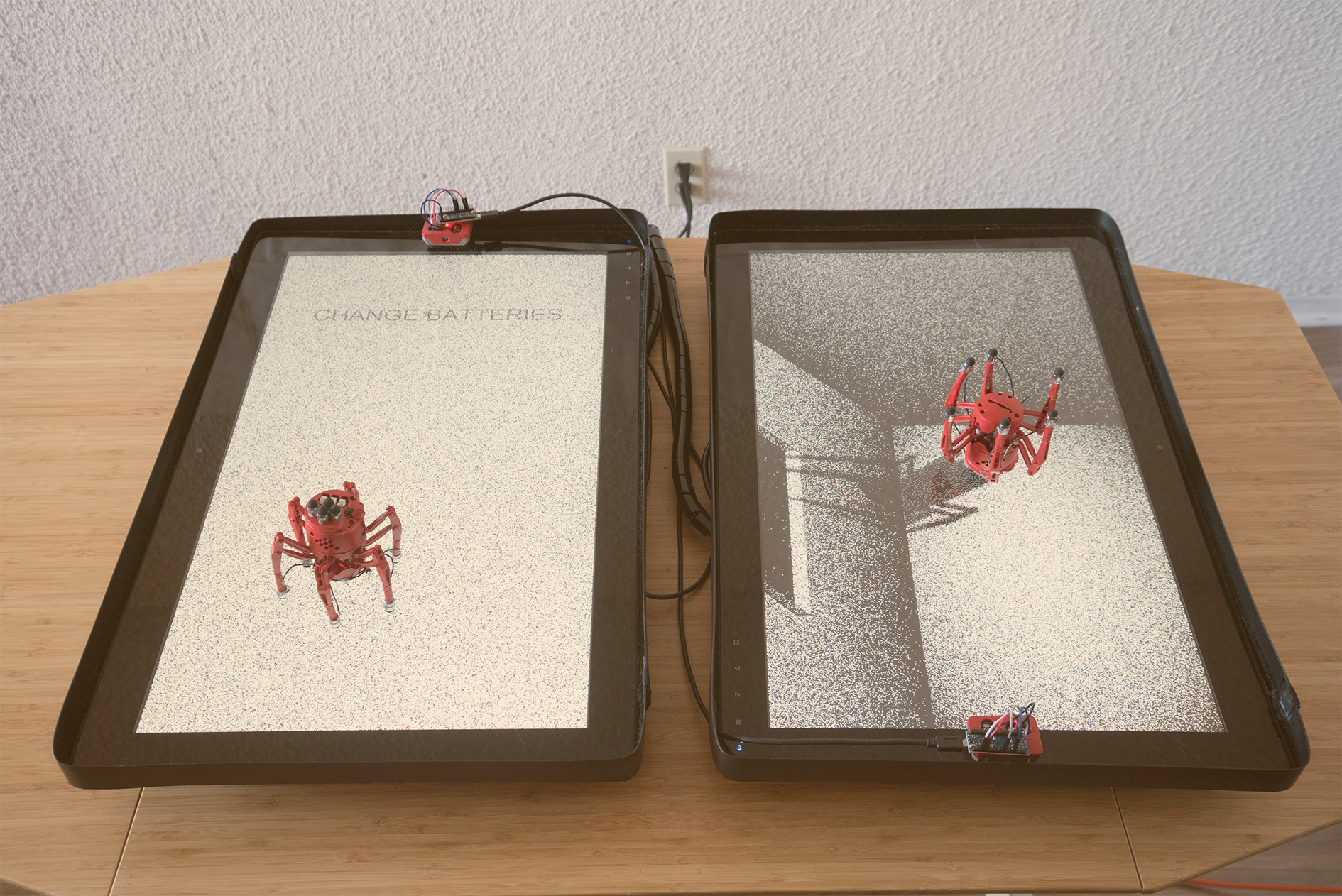
This installation consists of a diptych with two monitors in the horizontal position, each one hosting a small spider-like robot. In one of the panels, the robot is playing alive, and in the other, the robot is playing dead. In the first panel, the robot is walking in an area of the monitor that represents the floor of the virtual world. This robot engages with a virtual shadow, which moves around playfully trying to catch the robot. In the second panel, the monitor displays the same virtual environment as in the first, except that it is rotated. The second robot is turned off and lies on its upside down, while its shadow is slowly changing its outline around the inert machine.
The present work is an artistic investigation of robots as role-players, that transit between the inanimate, the living and the dead. It explores the transformation of the meanings that can be attributed to a robot, ranging from the living to the non-living. While robots are inanimate objects, their expressive components can provoke a transformation in their meaning, shifting their identification from the inanimate to the lifelike.
The diptych, however, hopes at extending the idea of life to an extreme and arriving at the notion of death. The robot’s condition of being alive, then, stands in opposition to being dead (having been alive) and being an inanimate object (having never been alive).
Technical Details
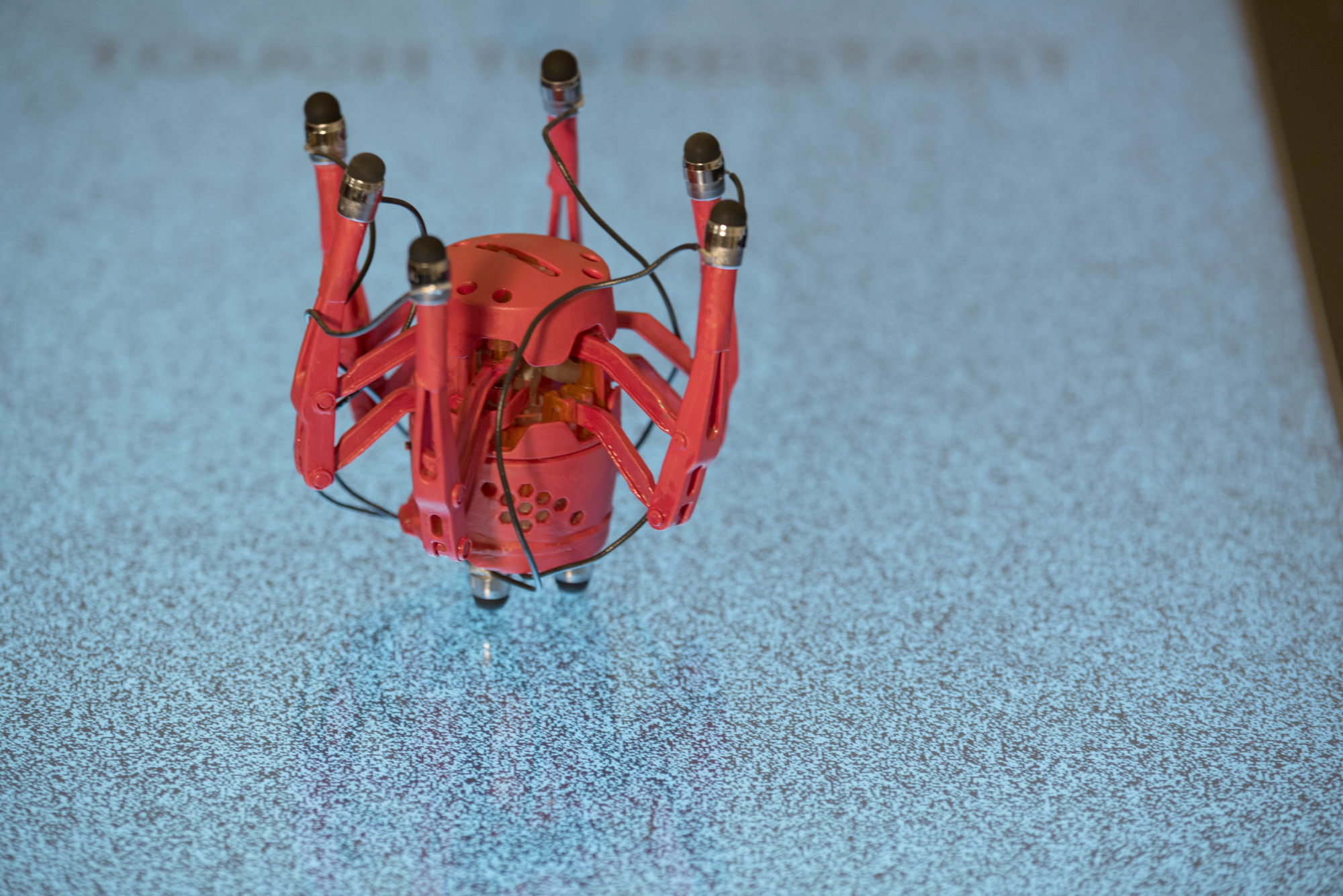
The robots used in this project are adaptations the robotic toy Hexabug Spider which is controlled using an Infrared (IR) remote controller. The robot can receive four commands via the IR remote, move forward, move backward, rotate clockwise, and rotate counter-clockwise. The robots have been modified by adding stylus pen tips to the feet of the robot and the top of the robot's head. The stylus pen tips are electrically connected to allow for the flow of current between stylus tips; this allows for capacitive touchscreens to detect touches by each leg of the robot and any touches made by the head of the robot when it is upside down. As the robot walks on the screen, the multi-touch interface written in Java recognizes the position of its legs and estimates the robot’s central location and the robot's heading. Each PC runs a Java program using Processing libraries which provides the interactive behavior between the robot and the virtual shadow. The desired robot commands are communicated through serial via a USB cable from the Java program to an Arduino Nano, which is in turn connected to the robot’s original IR remote controller. The robot is powered by three 1.5-volt coincell batteries, which provide a lifetime of approximately 45 minutes if the robot is in constant motion.
The virtual shadows are sprites, 2D characters, integrated into a larger scene. Sprites are composed of cycles of images, in which the position of the character changes frame by frame, and gives the illusion of continuous and animated movement.
CREDITS
Michael Di Perna- Robot control, robot-computer interaction, computers synchronization
Disrael Camargo - Processing environment (images generation)
Stephen Menzies–Development of shadow’s sprites
Mailis Rodrigues–Transformation of sprites into the grid
Robot Cut- Oriented the selection of robots
Natasha Vesper-Register of the work with photos and videos
Sponsored by Hexagram, TAG, and CAPES
ACKNOWLEDGMENT
Concordia University
Dr. Bill Vorn
Dr. Luis Rodrigues and HYCONS lab
Dr. Mia Consalvo
Gavin Kenneally
CAPES
Hexagram
TAG